A Schindler – a világ egyik vezető felvonó- és mozgólépcső-gyártója – próbaprojektet indított egy automatikus, önállóan üzemelő, robotizált rendszerre, amely felvonók beszerelésére szolgál.
A vállalat ehhez a világújdonsághoz az ABB ipari robotját választotta ki.
A felvonók beszerelésénél a vezetősínek és a liftajtók precíz, biztonságos rögzítéséhez a liftaknában ankercsavarok használatosak – nagy mennyiségű ankercsavar. Minél magasabb az épület, annál több kell belőle.
„A beton liftaknában az ankercsavarok furatainak elkészítése fáradságos, monoton, fizikailag kimerítő feladat. A biztonságos, precíz munkavégzés nagyfokú pontosságot és teljes koncentrációt igényel”
– magyarázta Christian Studer, a Schindler technológiai újdonságokkal foglalkozó részlegének vezetője.
„A magasházakban a felvonó beszereléséhez több száz furatot kell létrehozni az ankercsavarok számára. Mindez a liftaknát zajos, poros munkakörnyezetté, a benne történő munkavégzést pedig megterhelővé teszi.”
A Schindler automatizált, robot-rásegítésű szerelőrendszert fejlesztett ki a minőség, valamint a felvonót beépítő szerelőszemélyzet munkakörülményeinek javítása érdekében. A rendszer neve „Robotizált felvonószerelő rendszer” (“Robotic Installation System for Elevators – R.I.S.E.). A Schindler a próbaprojektet a zürichi ETH műszaki egyetemmel, valamint a svájci ABB Robotics szoftveres szakértőivel együttműködve indította el.

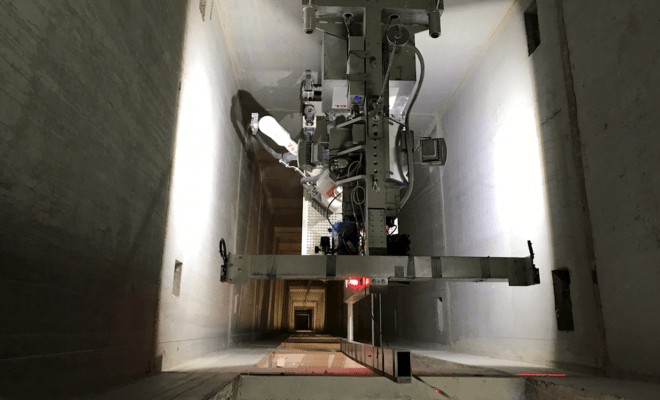
A robot fő feladata a furatok elkészítése és az ankercsavarok szerelése a liftaknában, azonban a rendszer ennél jóval többre is képes. Az önálló működésű szerelőrendszer az automatikus emelő segítségével független módon képes mozogni a szintek között – ilyenre még nem volt példa a történelem folyamán.
„A tervezés során kihívásnak számított az is, hogy a robotot igen nehéz feladat úgy programozni, hogy milliméteres pontossággal mindig azonos koordinátákra készítse el a furatokat. A gép a liftaknában pozícióról pozícióra mozog, és a viselkedését képesnek kell lennie folyamatosan, dinamikus módon a fúrási koordinátákhoz alakítani”
– magyarázta Studer.
A fúrási koordinátákat elméletben előre rögzítik. A munka megkezdése előtt azonban a robot megvizsgálja az akna falát, hogy nincs-e az útban például rejtett betonvas, ill. a beton felülete nem egyenetlen-e. A szerelőrendszer egy algoritmus segítségével kiszámítja a tűréseket, és ha szükséges, máshová helyezi át a furatokat.
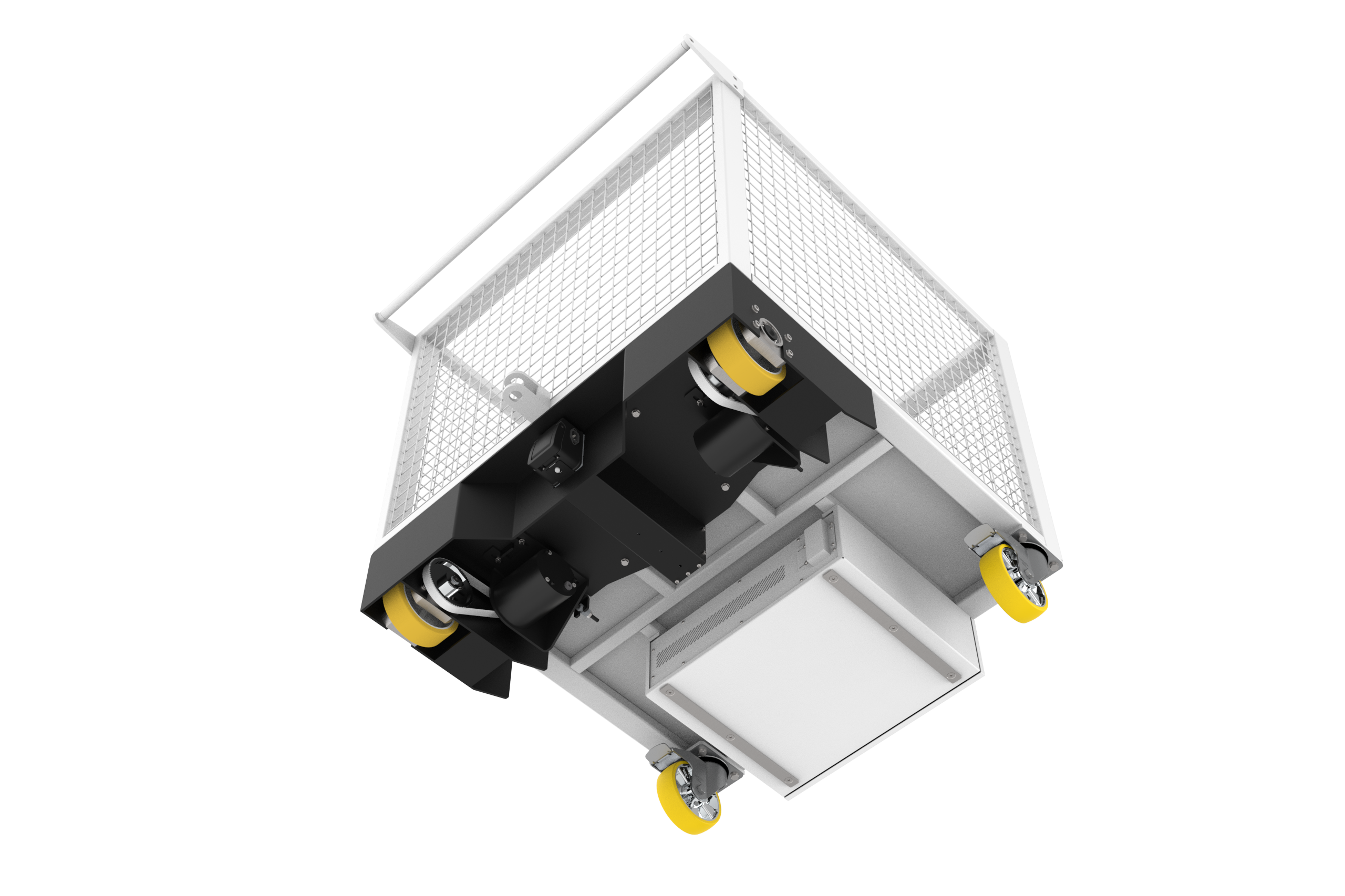
A célra megfelelő robot megválasztása szintén kihívást jelentett a projektcsapatnak. Végül az ABB IRB 2600 robotja mellett döntöttek. – 1,65 méteres kinyúlásával és huszonkilenc kilogrammos hasznos terhelésével ez a robot jól megfelelt a feladatra. Az ABB erős felépítésű ipari robotjai amúgy is arról ismertek, hogy megbízhatóan képesek működni mostoha körülmények között is: ebben az alkalmazásban ez különösen fontos követelmény – mondta Studer.
Az ipari robotok általában a gyár padlójára szerelve üzemelnek, és programjaikat a térbeli nullpontjukhoz viszonyítva hajtják végre. A „Robotizált felvonószerelő rendszer” (“Robotic Installation System for Elevators – R.I.S.E.) prototípusában azonban az IRB 2600 egy platformra van szerelve, amelyet egy ideiglenes telepítésű emelőrendszer fel-le mozgat a liftaknában. A robot ebben a háromdimenziós térben nem volt képes mindegyik fúrási helynél visszaállni az új nullpontba, ezért bizonyos mértékben felül kellett bírálnunk a vezérlőt annak érdekében, hogy a robotkar minden alkalommal pontosan a furat koordinátáira állhasson – magyarázta Studer.
Érzékelők ellenőrzik, hogy a furat a megfelelő helyen készült-e el, majd a robot beüti az ankercsavart, és tovább mozog a következő fúrási helyre – újra és újra, teljesen automatikus módon.
„A platformra kamerát is szereltünk, így a folyamat távolról is megfigyelhető, emellett a furatkészítéshez kapcsolódó összes adatot is dokumentálja a rendszer, mindazonáltal a működése teljesen önálló, azaz nincs szükség kezelőre a felügyelethez és a vezérléshez”
– mondta Studer. Mindez azt jelenti, hogy a rendszert elegendő telepíteni a liftaknába, ahol az önállóan, megállás nélkül működik mindaddig, amíg az összes ankercsavar a helyére nem kerül.
A prototípus több új európai felvonórendszer szerelésénél sikerrel vizsgázott. „Az IRB 2600 egyetlen alkalommal sem hibásodott meg. Ez jól mutatja, mennyire erős felépítésű robotról van szó” – tette hozzá Christian Studer.

A 2019. áprilisban tartott Tall+Urban innovációs konferencián a Magasépület és Városi Élettér Tanácsa (Council on Tall Buildings & Urban Habitat) a Schindlert a „Robotizált felvonószerelő rendszer” (“Robotic Installation System for Elevators – R.I.S.E.) termékéért kiválósági díjjal tüntette ki az Innováció kategóriájában. A Schindler egyre nagyobb mértékben tervezi használatba venni ezeket az autonóm rendszereket, melyek mindegyikét az ABB IRB 2600 robotjával szerelik majd fel.
„Az automatizálás népszerű témának számít az építőiparban”
– mondta Studer.
„A liftaknák egyszerű geometriájuknak köszönhetően különösen jó terepet adnak a digitális építéshez. Ezzel az autonóm rendszerrel a digitalizálás közvetlenül az építési területre vihető ki, hála a legfrissebb fejlesztésű érzékelőrendszereknek, valamint az e világpremier sikeréhez elengedhetetlen, általunk fejlesztett mesterséges intelligenciának”
– zárta mondandóját Studer.