Az intralogisztikában megfelelő szállítási struktúrák az előfeltételei minden iparágban annak, hogy a jövőben képesek legyenek ellenállni az egyre növekvő nyomásnak. Ennek alapja az átfogó automatizálás, ami elképzelhetetlen lenne erőteljes mikromotorok sokasága nélkül. Ezeknek a mikromotoroknak sok esetben rendkívül szűkös körülmények között is óriási erők kifejtésre kell alkalmasnak lenniük, folyamatos vagy stop-and-go üzemmódban is megbízhatóan kell működniük, és gyakran rendkívül precíz pozicionálási feladatokat is el kell látniuk. A FAULHABER hajtásrendszerei számos különböző alkalmazásokban bizonyították teljesítőképességüket, a szortírozástól a szállításon át a különféle robotikai megoldások széles skálájáig.
1. ábra: Az intralogisztika elképzelhetetlen nagy teljesítményű mikromotorok sokasága nélkül. A hajtásoknak gyakran rendkívül szűkös körülmények között is óriási erőt kell kifejteniük, folyamatos üzemben is mindig megbízhatóan kell működniük, és gyakran nagy pontossággal kell pozícionálniuk. (Copyright: FAULHABER)
Szállítás és válogatás
Amikor a termékeket szállítószalagon vagy görgős szállítópályán mozgatják, szétválogatják azokat és a kívánt feldolgozó pályára szállítják sínkapcsolók, terelőlapok vagy csúszdák segítségével. Az automatikus válogatórendszer sebessége nem csak azokban a nagy raktárakban számít kulcsfontosságú tényezőnek, ahol óránként több ezer csomagot szállítanak ilyen szállítószalagokon. Az irányváltó kapcsolókat a másodperc törtrésze alatt kell pontosan a megfelelő helyzetbe állítani. Ezt a feladatot gyakran szénkefével ellátott egyenáramú mikromotorok és hozzáillő fogaskerekek kombinálásával oldják meg (1. ábra). Szénkefe rendszerük nagyon tartós, és különösen alkalmas dinamikus, nagy teljesítményű alkalmazásokhoz, gyors indítással/leállítással járó működtetéshez, ami az automatikus válogatáshoz elengedhetetlen.

2. ábra: A TORU logisztikai robot autonóm hajtórendszert és kezelésre szolgáló robotikarendszert tartalmaz. (Copyright: Magazino)
Autonóm logisztikai robotok
Az autonóm mozgás és az önállóan működő logisztikai robotok az „Intralogisztika 4.0” kritikus összetevői. Tárolásra, mozgatásra és kiszállítás előkészítésére használják ezeket. Az autonóm logisztikai roboton található, emelőoszlopból és megfogóból álló egység (2. ábra) egy hajtásrendszert is tartalmaz, amely pl. integrált mozgásvezérlővel és bolygókerekes hajtóművel ellátott kefe nélküli egyenáramú szervomotorokból áll. Emelőoszlopban használva például ez a kombináció pontos pozicionálást tesz lehetővé a tárolás és a kiszedés során, valamint állandó terhelésváltozásokkal járó folyamatos működés során is nagy folyamatbiztonságot biztosít. A teljes meghajtóegység súlya azonban mindössze nagyjából 300 gramm. Ez azt jelenti, hogy nincs szükség ellensúlyra még akkor sem, ha a megfogó teljesen ki van nyújtva. A mindössze 32 mm átmérőjű és 85,4 mm hosszúságú kefe nélküli egyenáramú szervomotorok szintén nagyon kompaktak. Így a megfogót nagyon laposra lehet készíteni, ezzel megoldható a közvetlenül a föld felett tárolt csomagok felemelése is. A drága tárolóhelyek így optimálisan kihasználhatók.

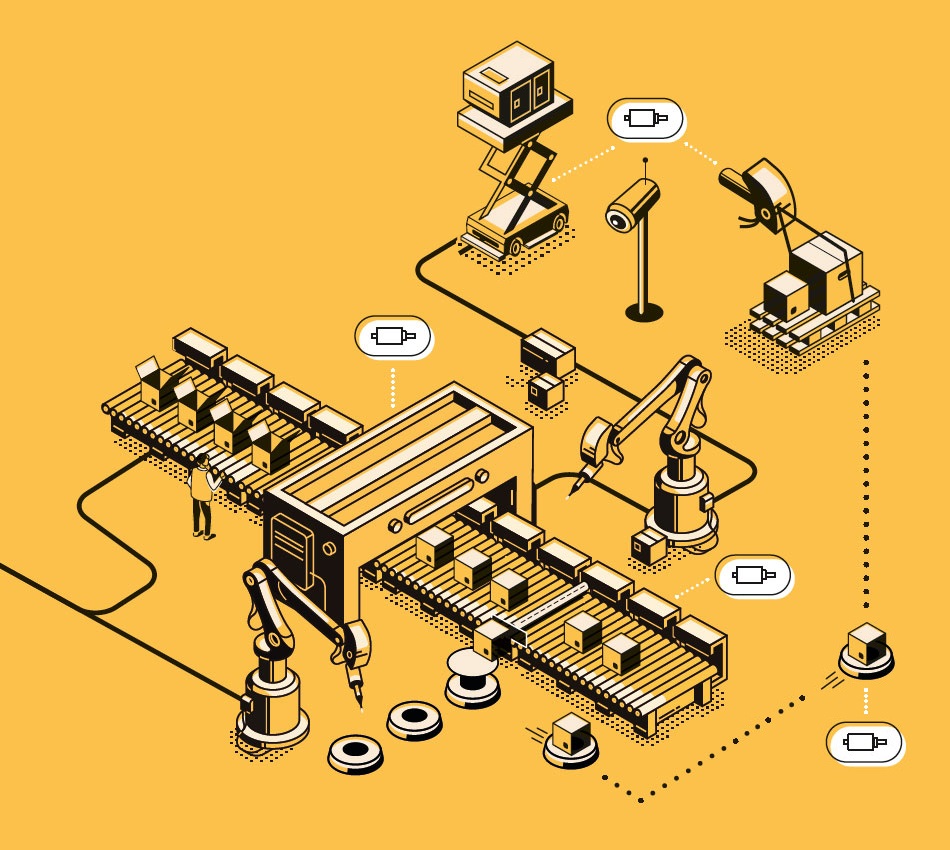
3. ábra: A kisméretű automatikusan irányított járművek (AGV-k) szállítják az alkatrészeket a gyártási folyamat során. A feldolgozó és összeszerelő állomások rugalmasan megközelíthetők. (Source: Prolynk)
Rugalmas a gyártás révén
Az automatikusan irányított járművek (AGV) választási lehetőséget kínálnak, ha a gyártási folyamatokban rugalmas szállításra van szükség. A FAULHABER hajtástechnológiája (lásd a cég dobozát) fontos szerepet játszik ebben: például a kefe nélküli egyenáramú szervomotorok alkalmasak kerekek meghajtására, így a motor teljesítménye bolygókerekes hajtóműveken és hajtószíjakon keresztül átvihető a kerekekre (3. ábra). A pontos helyzetérzékelés érdekében az IE3-1024 sorozat kódolóit közvetlenül a szervomotorokra építették. A különböző felbontásban elérhető mágneses inkrementális jeladók indexelő csatornát tartalmaznak a hajtótengely fordulatainak referenciálására, valamint szabványos, elektronikus jeladó interfésszel is rendelkeznek. A felbontás, a forgásirány, az index szélessége és az index pozíciója rugalmasan illeszthető az alkalmazáshoz. Egy mozgásszabályozó irányítja a szervomotorokat és kommunikál a vezérlővel. A mikromotorokat olyan mobil robotplatformokhoz is használják, amelyek teljesen önállóan mozognak az ipari csarnokokban, előre telepített irányítási rendszer nélkül. Különösen nyilvánvaló a kerékmodulokban mutatott magas fajlagos teljesítményük (4. kép). Így az intralogisztika szinte minden területén megtalálhatók a kisméretű FAULHABER hajtásrendszerek.
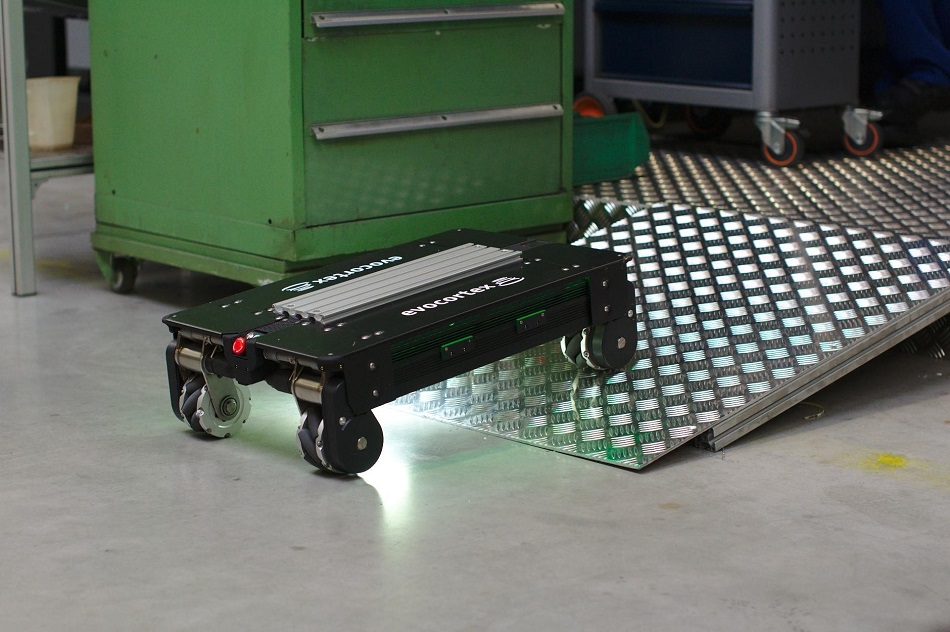
4. ábra: A speciálisan kialakított Mecanum kerekekkel ellátott kerékmodulok minden irányban lehetővé teszik a vezetési manővereket. Még a rámpák is könnyen legyőzhetők a robotok számára. (Source: Evocortex)
További információ >>

Ha feliratkozik a Műszaki Magazin Hírlevelére, sosem marad le a híreinkről! További friss híreket talál a Műszaki Magazin főoldalán! Csatlakozzon hozzánk a Facebookon is!